
Lista de Exercícios 4
Contents
Lista de Exercícios 4#
Solucionário matemático e computacional de exercícios selecionados da Lista de Exercícios 4.
%matplotlib inline
import numpy as np
import sympy as sy
import matplotlib.pyplot as plt
# Funções Implementadas
# Solução de Sistemas
def gaussjacobi(AB,ER,X0):
'''Realiza o cálculo de um sistema linear através do método de iterativo de Gauss-Jacobi.
Sinopse:
X = gaussjacobi(AB,ER,X0)
Entradas:
AB - Matriz aumentada (np.array) do sistema linear
ER - Erro relativo (forma decimal) entre a iteração i e a iteração i-1
X0 - Vetor estimativa inicial da solução
Saídas:
X - Vetor solução do sistema linear
@ney
'''
A = AB[:,0:-1]
B = AB[:,-1]
X = X0
erro = 1
while (erro > ER):
Xp = np.copy(X)
for i in range(len(A)):
s = 0
for j in range(len(A)):
if (i != j):
s += A[i,j]*Xp[j]
X[i] = (B[i] - s)/A[i,i]
EA = np.absolute(X - Xp)
Emax = np.amax(EA)
idx = np.where(EA == Emax)
if (len(idx[0]) > 1):
erro = np.absolute(EA[idx[0][0]]/X[idx[0][0]])
else:
erro = np.absolute(EA[idx[0]]/X[idx[0]])
X = np.around(X, decimals=3)
return X
def gaussseidel(AB,ER,X0):
''' Função que realiza o cálculo de um sistema linear através do método de iterativo de Gauss-Seidel.
Sinopse:
X = gaussseidel(AB,ER,X0)
Entradas:
AB - Matriz aumentada (np.array) do sistema linear
ER - Erro relativo (forma decimal) entre a iteração i e a iteração i-1
X0 - Vetor estimativa inicial da solução
Saídas:
X - Vetor solução do sistema linear
@ney
'''
A = AB[:,0:-1]
B = AB[:,-1]
X = X0
erro = 1
while (erro > ER):
Xp = np.copy(X)
for i in range(len(A)):
s = 0
for j in range(len(A)):
if (i != j):
s += A[i,j]*X[j]
X[i] = (B[i] - s)/A[i,i]
EA = np.absolute(X - Xp)
Emax = np.amax(EA)
idx = np.where(EA == Emax)
if (len(idx[0]) > 1):
erro = np.absolute(EA[idx[0][0]]/X[idx[0][0]])
else:
erro = np.absolute(EA[idx[0]]/X[idx[0]])
X = np.around(X, decimals=3)
return X
def jacobian(F,Xs):
'''Função que realiza o cálculo da matriz jacobiana.
Sinopse:
J = jacobian(F,Xs)
Entradas:
F - Vetor contendo as equações (simbólicas) do sistema não-linear
Xs - Vetor contendo as variáveis (simbólicas) do sistema não-linear
Saídas:
J - Matriz jacobiana (simbólica)
@ney
'''
J = sy.zeros(len(Xs), len(Xs))
for i in range(len(Xs)):
for j in range(len(Xs)):
J[i,j] = sy.diff(F[i],Xs[j])
return J
def newtonnaolin(F,Xs,ER,X0):
'''Função que realiza o cálculo de um sistema não-linear através do método de iterativo de Newton.
Sinopse:
X = newtonnaolin(F,Xs,ER,X0)
Entradas:
F - Vetor (sy.Matrix) contendo as equações (simbólicas) do sistema não-linear
Xs - Vetor (sy.Matrix) contendo as variáveis (simbólico) do sistema não linear
ER - Erro relativo (forma decimal) entre a iteração i e a iteração i-1
X0 - Vetor estimativa inicial da solução
Saídas:
X - Vetor solução do sistema linear
@ney
'''
J = jacobian(F,Xs)
erro = 1
X = np.copy(X0)
while (erro > ER):
Xp = np.copy(X)
A = J[:,:]
B = F[:,:]
subs = []
for i in range(len(Xs)):
subs.append((Xs[i],X[i]))
A = np.asarray(A.subs(subs), dtype=float)
B = np.asarray(B.subs(subs), dtype=float)
B *= -1
S = np.linalg.solve(A,B)
S = np.transpose(S)
X += S[0]
EA = np.absolute(X - Xp)
Emax = np.amax(EA)
idx = np.where(EA == Emax)
if (len(idx[0]) > 1):
erro = np.absolute(EA[idx[0][0]]/X[idx[0][0]])
else:
erro = np.absolute(EA[idx[0]]/X[idx[0]])
X = np.around(X, decimals=3)
return X
# Interpolação
def int_newton(X, Y, x0):
'''Função que realiza a interpolação de grau n de n+1 pontos dados, utilizando o método das diferenças divididas
de Newton.
Sinopse:
y0 = int_newton(X, Y, x0)
Entradas:
X - Array com as coordenadas em x para os pontos dados
Y - Array com as coordenadas em y para os pontos dados
x0 - Ponto ao qual se deseja a estimativa f(x0)
Saídas:
y0 - Estimativa desejada f(x0)
@ney
'''
n = len(X)
x = sy.symbols("x")
dx = []
f = []
aux = np.diff(Y)
for i in range(1,n):
dx.append(X[i:] - X[:-i])
f.append(aux/dx[i-1]) # Diferenças Divididas
aux = np.diff(f[i-1])
b = []
for i in f:
b.append(i[0]) # Coeficientes do polinômio
f = Y[0]
aux = 1
for i in range(n-1):
aux *= x - X[i]
f += b[i]*aux # Polinômio
y0 = f.subs(x,x0) # Estimativa desejada
return float(y0)
def int_lagrange(X, Y, x0):
'''Função que realiza a interpolação de grau n de n+1 pontos dados, utilizando o método de Lagrange.
Sinopse:
y0 = int_lagrange(X, Y, x0)
Entradas:
X - Vetor com as coordenadas em x para pontos dados
Y - Vetor com as coordenadas em y para pontos dados
x0 - Ponto ao qual se deseja a estimativa f(x0)
Saídas:
y0 - Estimativa desejada f(x0)
@ney
'''
n = len(X)
x = sy.symbols("x")
f = 0
for i in range(n):
L = 1
for j in range(n):
if (i != j):
L *= (x - X[j])/(X[i] - X[j])
f += L*Y[i] # Polinômio
y0 = f.subs(x,x0) # Estimativa desejada
return float(y0)
Métodos iterativos para sistemas lineares#
Questão 1#
Verifique o condicionamento e o critério das linhas para os sistemas abaixo e em seguida aplique o método de Gauss-Jacobi para determinar uma solução aproximada, com erro absoluto inferior a \(10^{-2}\), tomando a aproximação inicial \(x^{(0)} = 0\).
(a) \begin{cases} 2x_1 − x_2 = 1 \ x_1 + 2x_2 = 3 \end{cases}
(b) \begin{cases} x_1 − 0.25x_2 − 0.25x_3 = 0 \ −0.25x_1 + x_2 − 0.25x_4 = 0 \ −0.25x_1 + x_3 − 0.25x_4 = 0.25 \ −0.25x_2 + x_4 = 0.25 \end{cases}
Obs. Tome como número de condicionamento o valor \(C = det(Ã)\), em que \(Ã\) e obtida de \(A\) fazendo com que o maior elemento em valor absoluto em cada linha de \(Ã\) seja igual a \(1\).
# Solução
# (a)
A = np.array([[2., -1.], [1., 2.]]) # Matriz de coeficientes constantes
B = np.array([[1.], [3.]]) # Vetor de constantes
X = np.array([[0.], [0.]]) # Estimativa inicial (X0)
EA = 10**(-2)
erro = 1
while (erro > EA):
Xp = np.copy(X)
for i in range(len(A)):
s = 0
for j in range(len(A)):
if (i != j):
s += A[i,j]*Xp[j]
X[i] = (B[i] - s)/A[i,i]
erro = np.amax(np.absolute(X - Xp))
X = np.around(X, decimals=3)
print("(a)\nO número C de condicionamento é:", np.around(np.linalg.det(A), decimals=3))
print("\nA solução do problema é:\n", X)
# (b)
A = np.array([[1., -0.25, -0.25, 0.], [-0.25, 1., 0., -0.25], [-0.25, 0., 1., -0.25], [0., -0.25, 0., 1.]]) # Coeficientes
B = np.array([[0.], [0.], [0.25], [0.25]]) # Vetor de constantes
X = np.array([[0.], [0.], [0.], [0.]]) # Estimativa inicial (X0)
EA = 10**(-2)
erro = 1
while (erro > EA):
Xp = np.copy(X)
for i in range(len(A)):
s = 0
for j in range(len(A)):
if (i != j):
s += A[i,j]*Xp[j]
X[i] = (B[i] - s)/A[i,i]
erro = np.amax(np.absolute(X - Xp))
X = np.around(X, decimals=3)
print("\n(b)\nO número C de condicionamento é:", np.around(np.linalg.det(A), decimals=3))
print("\nA solução do problema é:\n", X)
(a)
O número C de condicionamento é: 5.0
A solução do problema é:
[[0.998]
[1.002]]
(b)
O número C de condicionamento é: 0.812
A solução do problema é:
[[0.107]
[0.093]
[0.343]
[0.272]]
Questão 2#
Considere o sistema
\begin{cases} 15c_1 − 2c_2 − c_3 = 3800 \ −3c_1 + 18c_2 − 6c_3 = 1200 \ −4c_1 − c_2 + 12c_3 = 2350 \end{cases}
(a) Verifique o condicionamento do sistema.
(b) Verifique o critério das linhas.
© Verifique o critério de Sassenfeld.
(d) Determine uma solução aproximada do sistema com erro relativo percentual abaixo de \(5\%\) usando o método iterativo de Gauss-Jacobi.
(e) Repita o item (d) usando o método de Gauss-Seidel.
(f) Compare o número de iterações nos itens (d) e (e).
# Solução
AB = np.array([[15., -2., -1., 3800.], [-3., 18., -6., 1200.], [-4., -1., 12., 2350.]])
ER = 5/100
X0 = np.array([[0.], [0.], [0.]])
# (d) Gauss-Jacobi
A = AB[:,0:-1]
B = AB[:,-1]
X = np.copy(X0)
erro = 1
k1 = 0
while (erro > ER):
Xp = np.copy(X)
for i in range(len(A)):
s = 0
for j in range(len(A)):
if (i != j):
s += A[i,j]*Xp[j]
X[i] = (B[i] - s)/A[i,i]
EA = np.absolute(X - Xp)
Emax = np.amax(EA)
idx = np.where(EA == Emax)
erro = np.absolute(EA[idx[0]]/X[idx[0]])
k1 += 1
X = np.around(X, decimals=3)
print("(d) A solução de X é:\n", X)
# (e) Gauss-Seidel
A = AB[:,0:-1]
B = AB[:,-1]
X = np.copy(X0)
erro = 1
k2 = 0
while (erro > ER):
Xp = np.copy(X)
for i in range(len(A)):
s = 0
for j in range(len(A)):
if (i != j):
s += A[i,j]*X[j]
X[i] = (B[i] - s)/A[i,i]
EA = np.absolute(X - Xp)
Emax = np.amax(EA)
idx = np.where(EA == Emax)
erro = np.absolute(EA[idx[0]]/X[idx[0]])
k2 += 1
X = np.around(X, decimals=3)
print("\n(e) A solução de X é:\n", X)
# (f)
print("\n(f) O número de iterações pelo método de Gauss-Jacobi foi:", k1)
print("O número de iterações pelo método de Gauss-Seidel foi:", k2)
(d) A solução de X é:
[[301.184]
[216.637]
[311.689]]
(e) A solução de X é:
[[302.072]
[220.055]
[314.862]]
(f) O número de iterações pelo método de Gauss-Jacobi foi: 4
O número de iterações pelo método de Gauss-Seidel foi: 3
Questão 3#
Use o método iterativo de Gauss-Seidel para determinar uma solução aproximada do sistema com erro relativo percentual abaixo de \(5\%\) dos seguintes sistemas. Antes verifique o critério de Sassenfeld e caso algum dos sitemas não o satisfaça, reorganize o sistema permutando linhas e/ou colunas para garantir a convergência.
(a) \begin{cases} 10x_1 + 2x_2 − x_3 = 27 \ −3x_1 − 6x_2 + 2x_3 = −61.5 \ x_1 + x_2 + 5x_3 = −21.5 \end{cases}
(b) \begin{cases} −3x_1 + x_2 + 12x_3 = 50 \ 6x_1 − x_2 − x_3 = 3 \ 6x_1 + 9x_2 + x_3 = 40 \end{cases}
© \begin{cases} 2x_1 − 6x_2 − x_3 = −38 \ −3x_1 − x_2 + 7x_3 = −34 \ −8x_1 + x_2 − 2x_3 = −20 \end{cases}
# Solução
# (a)
AB = np.array([[10., 2., -1., 27.], [-3., -6., 2., -61.5], [1., 1., 5., -21.5]])
ER = 5/100
X0 = np.array([0., 0., 0.])
X = gaussseidel(AB,ER,X0)
print("(a)\nA solução do sistema linear é: \n", X)
# (b)
AB = np.array([[6., -1., -1., 3.], [6., 9., 1., 40.], [-3., 1., 12., 50.]])
ER = 5/100
X0 = np.array([0., 0., 0.])
X = gaussseidel(AB,ER,X0)
print("\n(b)\nA solução do sistema linear é: \n", X)
# (c)
AB = np.array([[-8., 1., -2., -20.], [2., -6., -1., -38.], [-3., -1., 7., -34.]])
ER = 5/100
X0 = np.array([0., 0., 0.])
X = gaussseidel(AB,ER,X0)
print("\n(c)\nA solução do sistema linear é: \n", X)
(a)
A solução do sistema linear é:
[ 0.5 8. -6. ]
(b)
A solução do sistema linear é:
[1.697 2.829 4.355]
(c)
A solução do sistema linear é:
[ 4.005 7.992 -1.999]
Questão 4#
Dos seguintes sistemas abaixo identifique qual(is) deles nao pode(m) ser resolvido(s) usando o método iterativo de Gauss-Seidel.
(a) \begin{cases} 9x + 3y + z = 13 \ −6x + 8z = 2 \ 2x + 5y − z = 6 \end{cases}
(b) \begin{cases} x + y + 6z = 8 \ x + 5y − z = 5 \ 4x + 2y − 2z = 4 \end{cases}
© \begin{cases} −3x + 4y + 5z = 6 \ −2x + 2y − 3z = −3 \ 2y − z = 1 \end{cases}
Solução#
(a) Convergente
(b) Divergente
© Divergente
Questão 5#
Uma companhia de eletrônica produz transistores, resistores e chips de computador. Cada transistor usa quatro unidades de cobre, uma unidade de zinco e duas unidades de vidro. Cada resisitor usa três, três e uma unidades de cada material, respectivamente, e cada chip de computador usa duas, uma e três unidades desses materiais, respectivamente. Colocando essas informações em uma tabela, tem-se:
Componente |
Cobre |
Zinco |
Vidro |
|---|---|---|---|
Transistor |
4 |
1 |
2 |
Resistor |
3 |
3 |
1 |
Chip de Computador |
2 |
1 |
3 |
O fornecimento desses materiais varia de semana para semana. Assim, a companhia precisa determinar uma meta de produção diferente para cada semana. Por exemplo, em uma semana a quantidade total de materiais disponíveis era 960 unidades de cobre, 510 unidades de zinco e 610 unidades de vidro. Determine o sistema de equações que modela essa meta de produção e determine a sua solução, pelo método de Gauss-Seidel, para determinar o número de transistores, resistores e chips de computador fabricados nessa semana.
# Solução
AB = np.array([[4., 3., 2., 960.], [1., 3., 1., 510.], [2., 1., 3., 610.]])
ER = 1/100
X0 = np.array([[0.], [0.], [0.]])
X = gaussseidel(AB,ER,X0)
X = np.transpose(np.rint(X))
print("[T,R,C] =", X[0])
[T,R,C] = [120. 100. 90.]
Sistemas não-lineares#
Questão 6#
Usando o Método de Newton, determinar uma raiz para cada sistema não-linear abaixo com precisão \(\epsilon= 10^{-3}\):
(i) $\(\begin{cases} x^2 + y^2 = 2 \\ x^2 - y^2 = 1 \end{cases} \quad x^{(0)} = \begin{bmatrix} 1.2 \\ 0.7 \end{bmatrix}\)$
(ii) $\(\begin{cases} 3x^2 y - y^3 = 4 \\ x^2 - x y^3 = 9 \end{cases} \quad x^{(0)} = \begin{bmatrix} -1 \\ -2 \end{bmatrix}\)$
(i) $\(\begin{cases} (x-1)^2 + y^2 = 4 \\ x^2 + (y-1)^2 = 4 \end{cases} \quad x^{(0)} = \begin{bmatrix} 2 \\ 1 \end{bmatrix}\)$
# Solução
x, y = sy.symbols("x, y")
Xs = sy.Matrix([x, y])
ER = 1/100
# (i)
F = sy.Matrix([x**2 + y**2 - 2, x**2 - y**2 - 1])
X0 = np.array([1.2, 0.7])
X = newtonnaolin(F,Xs,ER,X0)
print("(i) A solução do problema é:", X)
# (ii)
F = sy.Matrix([3*(x**2)*y - y**3 - 4, x**2 - x*y**3 - 9])
X0 = np.array([-1., -2.])
X = newtonnaolin(F,Xs,ER,X0)
print("\n(ii) A solução do problema é:", X)
# (iii)
F = sy.Matrix([(x-1)**2 + y**2 - 4, x**2 + (y-1)**2 - 4])
X0 = np.array([2., 1.])
X = newtonnaolin(F,Xs,ER,X0)
print("\n(iii) A solução do problema é:", X)
(i) A solução do problema é: [1.225 0.707]
(ii) A solução do problema é: [3.002 0.148]
(iii) A solução do problema é: [1.823 1.823]
Interpolação Polinomial#
Questão 7#
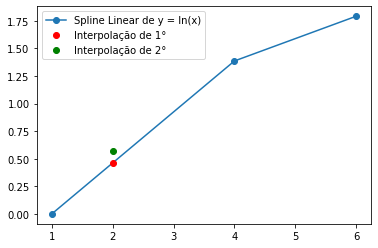
Use um polinômio interpolador de Lagrange de primeiro e segundo graus para calcular \(ln(2)\), com base nos seguintes dados:
\(x_i\) |
\(f(x_i)\) |
|---|---|
1 |
0 |
4 |
1.386294 |
6 |
1.791759 |
# Solução
X = [1, 4, 6]
Y = [0, 1.386294, 1.791759]
# (i) Polinômio de Primeiro Grau
y1 = int_lagrange(X[0:2],Y[0:2],2)
print("(i)\nA estimativa de ln(2) para o polinômio de primeiro grau é:", y1)
# (i) Polinômio de Segundo Grau
y2 = int_lagrange(X,Y,2)
print("\n(ii)\nA estimativa de ln(2) para o polinômio de segundo grau é:", y2)
plt.plot(X,Y, 'o-')
plt.plot(2,y1, 'or', 2,y2, 'og')
plt.legend(['Spline Linear de y = ln(x)', 'Interpolação de 1°', 'Interpolação de 2°']);
(i)
A estimativa de ln(2) para o polinômio de primeiro grau é: 0.46209799999999995
(ii)
A estimativa de ln(2) para o polinômio de segundo grau é: 0.5658441999999999
Questão 8#
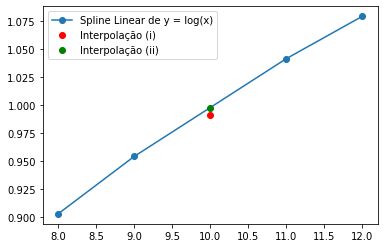
Faça uma estimativa de \(log(10)\) usando interpolação linear
(i) entre \(log(8) = 0.9030900\) e \(log(12) = 1.0791812\)
(ii) entre \(log(9) = 0.9542425\) e \(log(11) = 1.0413927\)
# Solução
# (i)
X = [8, 12]
Y = [0.9030900, 1.0791812]
y1 = int_lagrange(X,Y,10)
print("(i)\nA estimativa de ln(10) é:", y1)
# (i)
X = [9, 11]
Y = [0.9542425, 1.0413927]
y2 = int_lagrange(X,Y,10)
print("\n(ii)\nA estimativa de ln(10) é:", y2)
X = [8, 9, 11, 12]
Y = [0.9030900, 0.9542425, 1.0413927, 1.0791812]
plt.plot(X,Y, 'o-')
plt.plot(10,y1, 'or', 10,y2, 'og')
plt.legend(['Spline Linear de y = log(x)', 'Interpolação (i)', 'Interpolação (ii)']);
(i)
A estimativa de ln(10) é: 0.9911356000000002
(ii)
A estimativa de ln(10) é: 0.9978176
Questão 9#
Considere os dados e faça o que se pede:
x |
y |
|---|---|
1 |
3 |
2 |
6 |
3 |
19 |
5 |
99 |
7 |
291 |
8 |
444 |
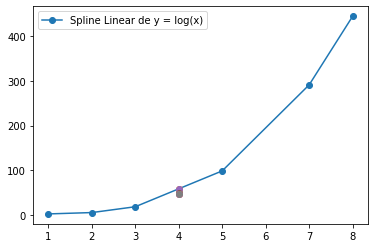
(i) Calcule f(4) usando polinomios interpoladores de Lagrange de primeiro a terceiro graus.
(ii) Calcule f(4) usando polinomios interpoladores de Newton de primeiro a quarto graus.
# Solução
X = np.array([1, 2, 3, 5, 7, 8])
Y = np.array([3, 6, 19, 99, 291, 444])
# (i)
y1 = int_lagrange(X[2:4],Y[2:4],4)
print("(i)\nA estimativa de f(4) de primeiro grau é:", y1)
y2 = int_lagrange(X[1:4],Y[1:4],4)
print("A estimativa de f(4) de segundo grau é:", y2)
y3 = int_lagrange(X[:4],Y[:4],4)
print("A estimativa de f(4) de terceiro grau é:", y3)
# (i)
y4 = int_newton(X[2:4],Y[2:4],4)
print("\n(ii)\nA estimativa de f(4) de primeiro grau é:", y4)
y5 = int_newton(X[1:4],Y[1:4],4)
print("A estimativa de f(4) de segundo grau é:", y5)
y6 = int_newton(X[:4],Y[:4],4)
print("A estimativa de f(4) de terceiro grau é:", y6)
y7 = int_newton(X[:-1],Y[:-1],4)
print("A estimativa de f(4) de quarto grau é:", y7)
plt.plot(X,Y, 'o-')
plt.plot(4,y1, 'o', 4,y2, 'o', 4,y3, 'o', 4,y4, 'o', 4,y5, 'o', 4,y6, 'o', 4,y7, 'o')
plt.legend(['Spline Linear de y = log(x)']);
(i)
A estimativa de f(4) de primeiro grau é: 59.0
A estimativa de f(4) de segundo grau é: 50.0
A estimativa de f(4) de terceiro grau é: 48.0
(ii)
A estimativa de f(4) de primeiro grau é: 59.0
A estimativa de f(4) de segundo grau é: 50.0
A estimativa de f(4) de terceiro grau é: 48.0
A estimativa de f(4) de quarto grau é: 48.0
Questão 10#
Conhecendo a seguinte tabela
x |
f(x) |
|---|---|
-1 |
15 |
0 |
8 |
3 |
-1 |
determine:
(i) O polinômio de interpolação para a função definida por este conjunto de pares de pontos. Ou seja, determine a solução do sistema
para o vetor de \(a\) dos coeficientes de \(P_2(x)\).
(ii) O polinomio de interpolação na forma de Newton.
# Solução
X = np.array([-1, 0, 3])
Y = np.array([15, 8, -1])
n = len(X)
x = sy.symbols("x")
dx = []
f = []
aux = np.diff(Y)
for i in range(1,n):
dx.append(X[i:] - X[:-i])
f.append(aux/dx[i-1])
aux = np.diff(f[i-1])
b = []
for i in f:
b.append(i[0])
f = Y[0]
aux = 1
for i in range(n-1):
aux *= x - X[i]
f += b[i]*aux
print("O polinômio é: P(x) =", sy.simplify(f))
O polinômio é: P(x) = 1.0*x**2 - 6.0*x + 8.0
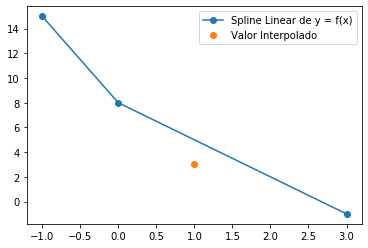
Questão 11#
Usando os dados da tabela do exercício anterior:
(i) Determine \(P_2(x)\) pela forma de Lagrange.
(ii) Calcule uma aproximação para \(f(1)\) usando o item (i).
# Solução
X = [-1, 0, 3]
Y = [15, 8, -1]
# (i)
n = len(X)
x = sy.symbols("x")
f = 0
for i in range(n):
L = 1
for j in range(n):
if (i != j):
L *= (x - X[j])/(X[i] - X[j])
f += L*Y[i]
print("(i)\nP(x) =", sy.simplify(f))
# (ii)
y = f.subs(x,1)
print("\n(ii)\nA aproximação para f(1) é:", float(y))
plt.plot(X,Y, 'o-')
plt.plot(1,y, 'o')
plt.legend(['Spline Linear de y = f(x)', 'Valor Interpolado']);
(i)
P(x) = x**2 - 6*x + 8
(ii)
A aproximação para f(1) é: 3.0
Questão 12#
Dada a tabela:
\(x\) |
\(x e^{3x}\) |
|---|---|
0 |
1 |
0.1 |
1.3499 |
0.2 |
1.8221 |
0.3 |
2.4596 |
0.4 |
3.3201 |
0.5 |
4.4817 |
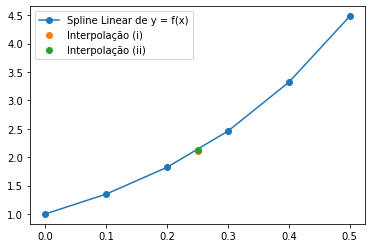
calcule \(f(0.25)\), onde \(f(x) = x e^{3x}\) usando polinômio de interpolação do 2° grau:
(i) Usando \(x_0 = 0.2, x_1 = 0.3, x_2 = 0.4\);
(ii) Usando \(x_0 = 0.1, x_1 = 0.2, x_2 = 0.3\);
# Solução
# (i)
X = [0.2, 0.3, 0.4]
Y = [1.8221, 2.4596, 3.3201]
y1 = int_lagrange(X,Y,0.25)
print("(i)\nA estimativa de f(0.25) é:", y1)
# (i)
X = [0.1, 0.2, 0.3]
Y = [1.3499, 1.8221, 2.4596]
y2 = int_lagrange(X,Y,0.25)
print("\n(ii)\nA estimativa de f(0.25) é:", y2)
X = [0, 0.1, 0.2, 0.3, 0.4, 0.5]
Y = [1, 1.3499, 1.8221, 2.4596, 3.3201, 4.4817]
plt.plot(X,Y, 'o-')
plt.plot(0.25,y1, 'o', 0.25,y2, 'o')
plt.legend(['Spline Linear de y = f(x)', 'Interpolação (i)', 'Interpolação (ii)']);
(i)
A estimativa de f(0.25) é: 2.112975
(ii)
A estimativa de f(0.25) é: 2.1201875
Questão 13#
Para a seguinte função tabelada
\(x\) |
\(x e^{3x}\) |
|---|---|
0 |
1 |
0.1 |
1.3499 |
0.2 |
1.8221 |
0.3 |
2.4596 |
0.4 |
3.3201 |
0.5 |
4.4817 |
construir a tabela de diferenças divididas.
# Solução
X = np.array([0, 0.1, 0.2, 0.3, 0.4, 0.5])
Y = np.array([1, 1.3499, 1.8221, 2.4596, 3.3201, 4.4817])
n = len(X)
x = sy.symbols("x")
dx = []
f = []
aux = np.diff(Y)
for i in range(1,n):
dx.append(X[i:] - X[:-i])
f.append(aux/dx[i-1])
aux = np.diff(f[i-1])
for i in range(len(f)):
print("\n As", i+1, "ªs diferenças divididas são:\n", f[i])
As 1 ªs diferenças divididas são:
[ 3.499 4.722 6.375 8.605 11.616]
As 2 ªs diferenças divididas são:
[ 6.115 8.265 11.15 15.055]
As 3 ªs diferenças divididas são:
[ 7.16666667 9.61666667 13.01666667]
As 4 ªs diferenças divididas são:
[6.125 8.5 ]
As 5 ªs diferenças divididas são:
[4.75]