Polinômio Interpolador de Lagrange
Contents
17. Polinômio Interpolador de Lagrange#
O polinômio interpolador de Lagrange é representado por:
\[P_n (x) = \sum _{i = 0}^{n} L_i (x) f(x_i)\]
onde
\[\begin{split}L_i(x) = \prod _{\substack{j = 0 \\ j \neq i}}^n \dfrac{x - x_j}{x_i - x_j}\end{split}\]
Por exemplo, a versão linear (\(n = 1\)) seria
\[P_1(x) = \dfrac{x − x_1}{x_0 − x_1} f(x_0) + \dfrac{x − x_0}{x_1 − x_0} f(x_1) \]
e a versão de segundo grau (\(n = 1\)) seria
\[P_2(x) = \dfrac{(x − x_1)(x − x_2)}{(x_0 − x_1)(x_0 − x_2)} f(x_0) + \dfrac{(x − x_0)(x − x_2)}{(x_1 − x_0)(x_1 − x_2)} f(x_1) + \dfrac{(x − x_0)(x − x_1)}{(x_2 − x_0)(x_2 − x_1)}f(x_2)\]
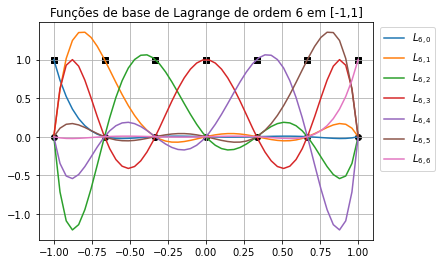
18. Funções de base de Lagrange#
Código gerador de funções de base de Lagrange de grau \(n\) por computação simbólica.
from sympy import Symbol
def symbolic_vector(n,var):
"""Cria uma lista com n variáveis simbólicas.
entrada:
n: numero de pontos
var: uma string (ex. 'x')
saida:
V: ['var0','var1',...,'varn-1']
"""
if not isinstance(var,str):
raise TypeError(f'{var} must be a string.')
V = [Symbol(var + str(i)) for i in range(0,n)]
return V
def L_nj(X,j):
""" Calcula a função de base de Lagrange L_{n,j}(x).
entrada:
X: um vetor contendo variáveis simbólicas
"""
# pega a variavel base passada e converte para simbólica
x = str(X[1])
x = Symbol(x[0:-1])
L = 1.0
for i in range(0,len(X)):
if i != j:
L *= (x - X[i])/(X[j] - X[i])
return L
import numpy as np
import matplotlib.pyplot as plt
# número de nós de interpolação: interpolação de (n-1)-ésimo grau
n = 7
# domínio de interpolação
x0,x1 = -1,1
# constroi vetor simbolico em x
X = symbolic_vector(n,'x')
# constroi pontos numericos
xp = np.linspace(x0,x1,num=n,endpoint=True)
# cria malha numérica
xv = np.linspace(x0,x1)
# matriz das funções
Y = np.zeros((n,len(xv)))
for i in range(0,n):
Y[i,] = np.zeros(np.shape(xv))
# montagem de dict para substituição: [xk,x0,x1,x2,...]
k = [str(i) for i in X]
k.insert(0,'x')
# preenche matriz
for i in range(0,Y.shape[0]):
for j in range(0,np.size(xv)):
v = list(np.concatenate([np.asarray([xv[j]]),xp]))
d = dict(zip(k,v))
Y[i,j] = L_nj(X,i).subs(d)
# plotagem das funções
leg = []
for i in range(0,Y.shape[0]):
plt.plot(xv,Y[i,])
s = '$L_{' + str(n-1) + ',' + str(i) + '}$'
leg.append(s)
plt.grid()
# nós
plt.scatter(xp,np.zeros(xp.shape),c= 'k')
plt.scatter(xp,np.ones(xp.shape),c='k',marker='s')
plt.legend(leg,loc='best',bbox_to_anchor=(0.7, 0.5, 0.5, 0.5))
plt.title('Funções de base de Lagrange de ordem ' + str(n-1) + ' em ['+str(x0)+','+str(x1)+']');