Objetivos de aprendizagem¶
Explicar o conceito de diferenças divididas;
Calcular diferenças divididas a partir de um conjunto de pontos e montar o polinômio interpolador de Newton correspondente;
Implementar algoritmo para gerar as funções de base e o polinômio interpolado de Newton
Aplicar interpolação polinomial a dados originados de várias áreas do conhecimento;
Em Busca do Desconhecido: Interpolação Polinomial¶
Interpolação Linear¶
Excluindo-se o caso de função constante, a forma mais simples de interpolação é ligar dois pontos dados com uma reta. Usando semelhança de triângulos entre nós e valores de função, obtemos
a qual pode ser reorganizada para fornecer
A notação indica que esse é um polinômio interpolador de primeiro grau. Observe que, além de representar a inclinação da reta ligando os pontos, o termo é uma aproximação por diferenças divididas da primeira derivada.
Interpolação Quadrática¶
Com três pontos, a interpolação quadrática é obtida a partir de
Um procedimento simples pode ser usado para determinar os valores dos coeficientes.
Para , a Equação (2) com pode ser usada para calcular
A Equação (3) pode ser substituída na Equação (2), a qual pode ser calculada em para
Finalmente, as Equações (3) e (4) podem ser substituídas na Equação (2), a qual pode ser calculada em e resolvida (depois de algumas manipulações algébricas) por
Forma Geral do Interpolante de Newton¶
A análise anterior pode ser generalizada para ajustar um polinômio de grau a pontos dados. O polinômio de grau é
Como foi feito anteriormente com as interpolações linear e quadrática, os pontos dados podem ser usados para calcular os coeficientes , , \dots , . Para um polinômio de grau , pontos dados são necessários: . Usamos esses pontos dados e as seguintes equações para calcular os coeficientes
onde as expressões entre colchetes correspondem a diferenças divididas.
Diferenças divididas¶
A primeira diferença dividida finita é representada em geral por
A segunda diferença dividida finita, que representa a diferença das duas primeiras diferenças divididas, é expressa em geral por
Analogamente, a -ésima diferença dividida é dada por
Funções de Base de Newton¶
Código gerador de funções de base de Newton de grau por computação simbólica.
from sympy import Symbol
def symbolic_vector(n,var):
"""Cria uma lista com n variáveis simbólicas.
entrada:
n: numero de pontos
var: uma string (ex. 'x')
saida:
V: ['var0','var1',...,'varn-1']
"""
if not isinstance(var,str):
raise TypeError("{0} must be a string.".format(var))
V = [Symbol(var + str(i)) for i in range(0,n)]
return V
def N_nj(X,j):
""" Calcula a função de base de Newton N_{n,j}(x).
entrada:
X: um vetor contendo variáveis simbólicas
"""
# pega a variavel base passada e converte para simbólica
x = X[1]
x = str(x)
x = Symbol(x[0:-1])
N = x/x;
if j > 0:
for k in range(0,j):
N *= (x - X[k])
return Nimport numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
# número de nós de interpolação: interpolação de (n-1)-ésimo grau
n = 5
# domínio de interpolação
x0,x1 = -1,1
# constroi vetor simbolico em x
X = symbolic_vector(n,'x')
# constroi pontos numericos
xp = np.linspace(x0,x1,num=n,endpoint=True)
# cria malha numérica
xv = np.linspace(x0,x1)
# matriz das funções
Y = np.zeros((n,len(xv)))
for i in range(0,n):
Y[i,] = np.zeros(np.shape(xv))
# montagem de dict para substituição: [xk,x0,x1,x2,...]
k = [str(i) for i in X]
k.insert(0,'x')
# preenche matriz
for i in range(0,Y.shape[0]):
for j in range(0,np.size(xv)):
v = list(np.concatenate([np.asarray([xv[j]]),xp]))
d = dict(zip(k,v))
Y[i,j] = N_nj(X,i).subs(d)
# plotagem das funções
# nós
plt.scatter(xp,np.zeros(xp.shape),c= 'k')
leg = []
for i in range(0,Y.shape[0]):
plt.plot(xv,Y[i,])
s = '$N_{' + str(i) + '}(x)$'
leg.append(s)
plt.grid()
plt.legend(leg,loc='best')
plt.title('Funções de base de Newton até ordem ' + str(n-1) + ' em ['+str(x0)+','+str(x1)+']');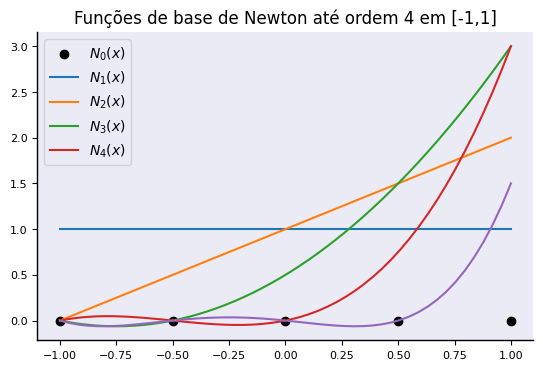
Exemplo:¶
Encontre o polinômio interpolador de Newton de ordem 1 para a tabela abaixo
| x | y |
|---|---|
| -1 | 4 |
| 0 | 1 |
Compute o valor de .
import numpy as np
import matplotlib.pyplot as plt
# interpolação linear
# coeficiente a0 = y0
# coeficiente a1 = (y1-y0)/(x1-x0)
# pontos
x0,y0 = -1,4
x1,y1 = 0,1
# ordem 0
a0 = y0
# interpolador de Newton
a1 = (y1-y0)/(x1-x0)
P1 = lambda x: a0 + a1*(x-x0)
# ponto interpolado
xp = -0.35
yp = P1(xp)
yp
# plotagem
# nós
plt.plot([x0,x1],[0,0],'ok')
# valores nodais
plt.plot([x0,x1],[y0,y1],'ok')
# interpolador
x = np.linspace(x0,x1,30,endpoint=True)
plt.plot(x,P1(x),label='$P_1(x)$')
# ponto interpolado
plt.plot(xp,0,'sr')
plt.plot(xp,yp,'sr')
plt.axvline(xp,0,yp,c='r',ls='dashed')
plt.grid()
plt.legend(loc='best');
P1(xp)2.05Exemplo:¶
Encontre o polinômio interpolador de Newton de ordem 2 para a tabela abaixo
| x | y |
|---|---|
| -1 | 4 |
| 0 | 1 |
| 2 | -1 |
Compute o valor de .
# interpolação quadrática
# Usando tabela DD:
# https://vnicius.github.io/numbiosis/interpolador-newton/index.html
# par adicional
x2,y2 = 2.,-1.
# coeficiente a2 = f[x0,x1,x2] = ( f[x1,x2] - f[x0,x1] ) / (x2 - x0)
# a2 = ( (y2-y1)/(x2-x1) - (y1-y0)/(x1-x0) )/(x2-x0)*(xx-x0)*(xx-x1)
# interpolador de Newton
P2 = lambda xx: P1(xx) + ( ( (y2-y1)/(x2-x1) - (y1-y0)/(x1-x0) )/(x2-x0) )*(xx-x0)*(xx-x1)
# ponto interpolado
yp = P2(xp)
yp
# plotagem
# nós
plt.plot([x0,x1,x2],[0,0,0],'ok')
# valores nodais
plt.plot([x0,x1,x2],[y0,y1,y2],'ok')
# interpolador
x = np.linspace(x0,x2,30,endpoint=True)
plt.plot(x,P2(x),label='$P_2(x)$')
# ponto interpolado
plt.plot(xp,0,'sr')
plt.plot(xp,yp,'sr')
plt.axvline(xp,0,yp,c='r',ls='dashed')
plt.grid()
plt.legend(loc='best');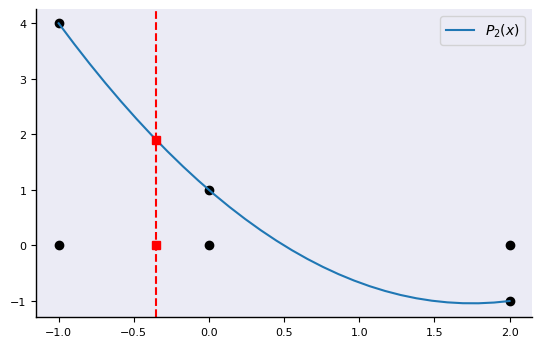
P2(xp)1.8983333333333332Exemplo:¶
Encontre o polinômio interpolador de Newton de ordem 3 para a tabela abaixo
| x | y |
|---|---|
| -1 | 4 |
| 0 | 1 |
| 2 | -1 |
| 3 | 1 |
Compute o valor de .
# interpolação quadrática
# Usando tabela DD:
# https://vnicius.github.io/numbiosis/interpolador-newton/index.html
# par adicional
x3,y3 = 3.,1.
# coeficiente a3 = f[x0,x1,x2,x3]
# interpolador de Newton
P3 = lambda xxx: P2(xxx) + 1/12*(xxx-x0)*(xxx-x1)*(xxx-x2)
# ponto interpolado
yp = P3(xp)
yp
# plotagem
# nós
plt.plot([x0,x1,x2,x3],[0,0,0,0],'ok')
# valores nodais
plt.plot([x0,x1,x2,x3],[y0,y1,y2,y3],'ok')
# interpolador
x = np.linspace(x0,x3,30,endpoint=True)
plt.plot(x,P3(x),label='$P_3(x)$')
# ponto interpolado
plt.plot(xp,0,'sr')
plt.plot(xp,yp,'sr')
plt.axvline(xp,0,yp,c='r',ls='dashed')
plt.grid()
plt.legend(loc='best');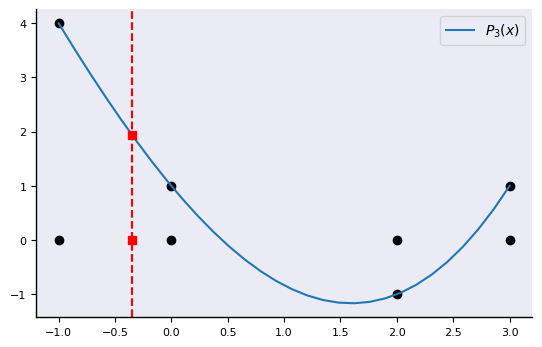
P3(-0.35)1.9428854166666665# ponto interpolado
YP = [P1(xp),P2(xp),P3(xp)]
# plotagem
# nós
plt.plot([x0,x1,x2,x3],[0,0,0,0],'ok')
# valores nodais
plt.plot([x0,x1,x2,x3],[y0,y1,y2,y3],'ok')
# interpoladores
x = np.linspace(x0,x3,30,endpoint=True)
plt.plot(x,P1(x),'b',label='$P_1(x)$')
plt.plot(x,P2(x),'c',label='$P_2(x)$')
plt.plot(x,P3(x),'g',label='$P_3(x)$')
# ponto interpolado
plt.plot(xp,0,'sr')
plt.plot([xp,xp,xp],YP,'sr')
plt.axvline(xp,0,max(YP),c='r',ls='dashed')
plt.grid()
plt.legend(loc='best');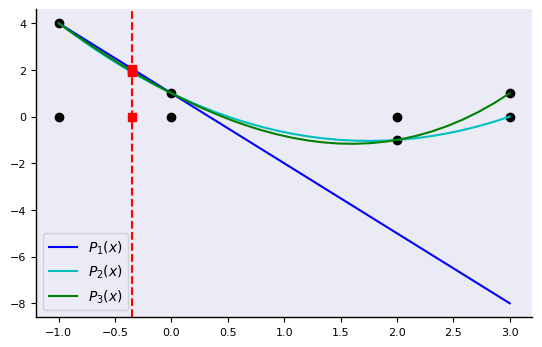
Comparação (zoom)¶
# interpoladores
x = np.linspace(-0.4,-0.3,30,endpoint=True)
plt.plot(x,P1(x),'b',label='$P_1(x)$')
plt.plot(x,P2(x),'c',label='$P_2(x)$')
plt.plot(x,P3(x),'g',label='$P_3(x)$')
# ponto interpolado
plt.plot([xp,xp,xp],YP,'sr')
plt.axvline(xp,0,max(YP),c='r',ls='dashed')
plt.grid()
plt.legend(loc='best');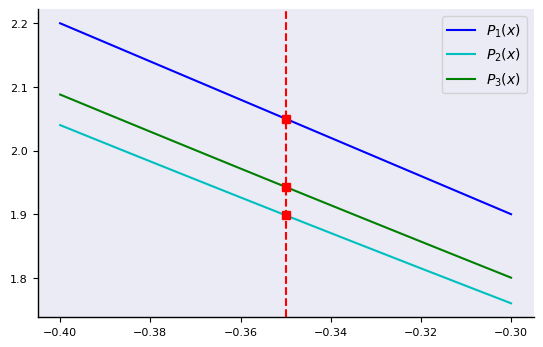
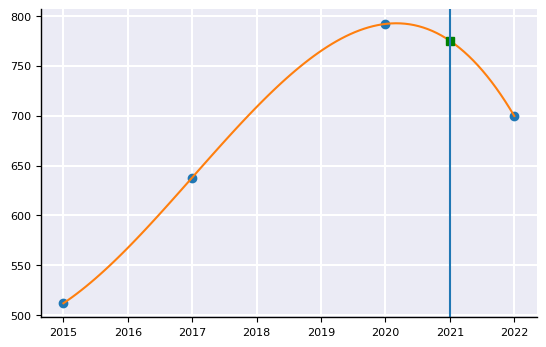
import sympy as sym
from sympy.abc import x
P3x = 512 + 63*(x-2015) - 2.34*(x-2015)*(x-2017) - 2.45*(x-2015)*(x-2017)*(x-2020)
P3xn = sym.lambdify(x, P3x) x = np.array([2015,2017,2020,2022])
y = np.array([512,638,792,700])
xn = np.linspace(2015,2022,num=100)
plt.plot(x,y,'o')
plt.plot(xn,P3xn(xn))
xx = 2021
yy = P3xn(xx)
plt.plot(xx,yy,'sg')
plt.axvline(x=xx)
print(f'Censo em {xx} = {yy}')Censo em 2021 = 775.0400000000081